2009年,Google成立無人駕駛部門、中國無人賽挑戰剛剛開始。經歷了Uber創建自動駕駛、特斯拉上市、通用收購Cruise、大量自動駕駛公司興起。
2018年上半年,自動駕駛走過gartner曲線的第一個峰值,行車事故、融資減少,負面新聞連連,投資人對行業大量砸錢之后,盈利卻看起來遙遙無期。
自動駕駛在讓整個汽車行業發生改變。實際上,如果以2009年Google啟動自動駕駛項目為開端,自動駕駛技術已經發展了整整10年。
10年間,自動駕駛技術如何推動了行業演進?未來10年又將向哪兒發展?會遇到哪些困難?圍繞這些話題,搜狐科技“智研所”沙龍第5期邀請到了視車科技創始人黃博淵進行主題演講。

??
以下是黃博淵演講精編:
黃博淵:今天很榮幸在這里跟大家分享自動駕駛對于未來汽車的改變這個話題。開始之前先做個自我介紹,我叫黃博淵,視車科技(北京)有限公司的創始人,在清華大學學習交通工具設計,后在奔馳設計中心擔任數字設計師。2015年創立了視車科技。公司主要業務分為兩個版塊,一是汽車三維可視化開發,二是未來車載交互的研發。視車科技在國內汽車三維可視化領域已遙遙領先,先后為奔馳、寶馬、奧迪、紅旗等知名品牌打造了多個數字化應用成功案例。在新中國成立70年之際,受紅旗品牌之托,視車科技為國產汽車之冠的紅旗L5車型打造了高水準的數字化內容。
??
今天的主題是自動駕駛,與我們的一款產品“視車Cyberide”平臺相關,該平臺未來或將成為國內最早應用于自動駕駛人機交互的開發平臺。我的分享分為三個部分:(1)介紹自動駕駛人機交互平臺視車Cyberide,(2)探討自動駕駛對人機交互的改變,(3)介紹自動駕駛的基礎數字化技術。通過這三部分的角度與大家探討下自動駕駛未來發展的方向。首先我們聊下視車Cyberide是什么?這個產品從名稱看是Cyber和Ride兩個英文單詞的合體。我們暢想在未來自動駕駛的環境中,真實駕駛會多有數字化的介入,有點像我們理解的賽博世界人類的機械義肢的概念。在未來駕駛車輛也不會再像現在用手去控制方向盤來開車,我們會使用全新的操控手柄在虛擬環境里駕馭交通工具。下面就從Cyberide的硬件、軟件和未來發展與大家分享一下視車科技定義的未來駕駛。
剛才這個視頻是不是讓大家很開腦洞?我們看到了真實世界已然變成虛擬世界中的一部分。視頻中所展現的場景在當下自動駕駛識別道路的過程中就已經把行人、障礙物、車輛變成了一個個的數字信號,在經過一系列的數字化建模與渲染,傳輸到虛擬現實頭盔里面,在頭盔里面的車輛、障礙物被轉化成形形色色的游戲角色,那么這就描繪了Cyberide平臺所做的事情。視車Cyberide平臺為未來自動駕駛提供了一個車機交互開發平臺,在平臺中能夠實現在無人駕駛道路上車輛姿態的體感反饋,通過動態的電磁懸架模擬真實道路上四個車輪的運動軌跡。整體臺架為無人駕駛座艙布局。平臺具有通用化接口,可實現多品牌的XR視覺顯示器、體感等交互硬件的接入。該平臺目前也在與多家主機廠的車型接口做適配。未來平臺上的交互開發人員只需要把XR頭顯接到車輛上,便可以實現交互內容與車輛行駛狀態的完美匹配。

??
我們從Cyberide平臺的構架上可以看到,通過對車輛高精地圖的移動數據獲取,包含車輛的姿態數據,一并傳輸到Cyberide引擎中,引擎將運動數據傳給電磁懸架和體感設備,同步完成物體信號與內容信號的疊加,最終通過高精定位系統傳輸給XR頭顯,眼部識別、氣味發生器等仿真設備。同時傳感器設備也將乘客的數據反饋到Cyberide引擎中,最終實現與其它乘客在虛擬環境中的協同交互,這就是視車Cyberide平臺的整體架構。
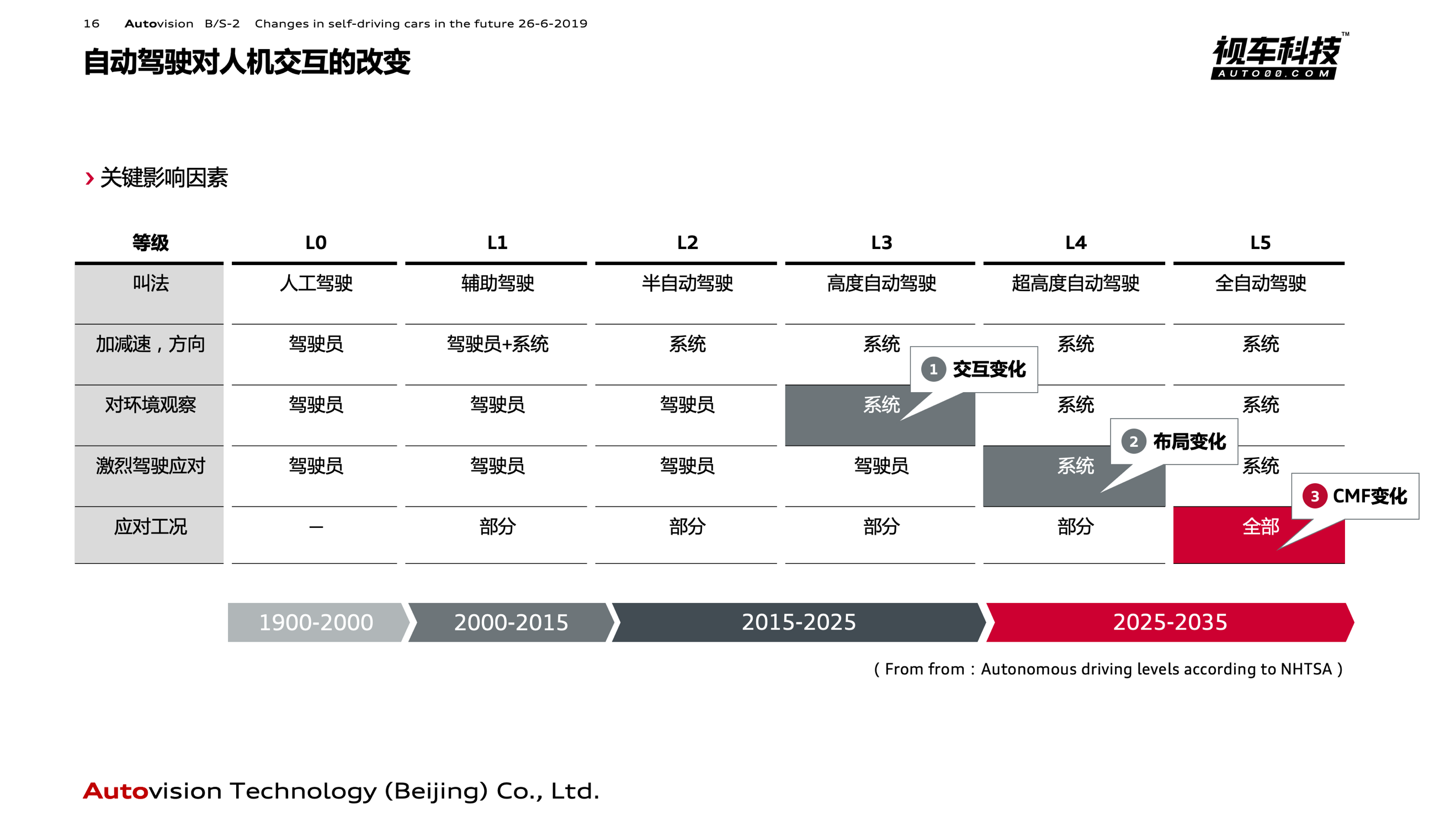
第二部分談到自動駕駛對未來人機交互的三個改變。在未來自動駕駛車里的人已經不再做駕駛車的行為了,那么人機交互究竟會有哪些改變?我們通過自動駕駛的分級標準來探究這個改變因何而生?在L0至L5的自動駕駛級別中,L0到L2級別區間車輛控制是無法脫離駕駛員手握方向盤的,所有人機交互都必須在駕駛員手握方向盤的操作范圍里面去完成,所以交互物不能離得太遠,也就導致在這期間的人機交互沒有產生過大的改變。
當到達L3級別時候,車輛在可控道路巡航過程中,駕駛員的雙手逐漸開始離開方向盤,視線也從觀察道路的風擋中漸漸移開,在L3級自動駕駛過程中就產生了駕駛員手和眼的交互間隙時段。這個間隙由系統介入車輛的控制,駕駛員的雙手視覺得到了間歇解放,也就為風擋變成顯示屏促成了可能。這時候駕駛員肯定不能再用手指去夠風擋觸摸交互了。所以在L3自動駕駛級別對未來人機產生的最大影像就是交互的變化,車內交互從觸摸變為手勢識別、語音識別,車內顯示也不會再局限在屏幕上。
當車輛到達L4超高自動駕駛階段,與L3最大區別是所有的道路情況下駕駛員都不需要再去取得車輛控制權了,車輛的方向盤會暫時收在中控臺里,在L4級別階段車輛就不再需要方向盤,儀表盤中控臺也就沒有存在必要了。所以在L4級別的最大改變是對車輛的整體布局的改變。車輛實現了從傳統的前后排座椅布局,從三廂、兩廂燃油車到電氣化單箱車的結構轉變。底盤空間被最大化利用,人們的乘坐方式變為面對面環繞式布局,交通工具將提供最大化的空間來滿足人在車內的多種活動。
??
當到達L5全自動駕駛級別,車輛已經完全成為了一個移動空間,在這個空間里面會產生什么樣的變化?車已經不再是我們從A點到B點的移動工具了,屆時車內會產生全新的CMF的變化。傳統車輛門板的色彩、面料、處理方式和功能都會產生改變。如車廂的內覆蓋件完全變成了復合式顯示材料,可以在上面去直接交互,車輛也不再需要風擋玻璃去觀察外部道路情況,整個外飾的覆蓋件材料也可能成為一個柔性顯示屏。
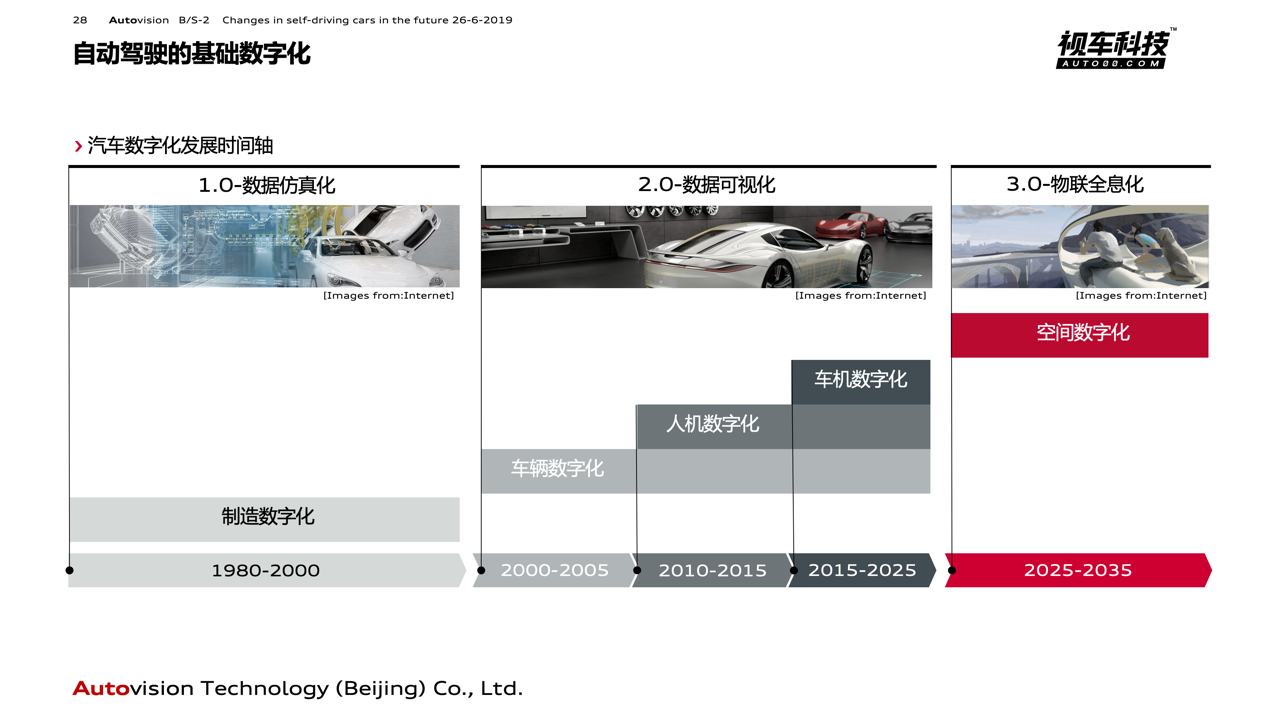
第三部分談到自動駕駛最基礎的數字化部分。數字化技術在四十多年前就已經應用到汽車行業中了。汽車的數字化發展歷程共分為三個階段:1.0階段稱為數字仿真化。在汽車的設計研發以及生產過程中大量普及應用。早在上世紀七八十年代開始車輛的開發流程中逐步開始介入數字化。從車輛的設計,人機工程驗證、性能、風阻、耐久性、安全性甚至到車輛的制造、生產線的建設環節。數字化技術在這個階段起到了提升汽車研發效率,提高車輛安全系數、增強駕駛性能的不可或缺的作用。
到了數字化2.0階段,稱為數字可視化。第二階段是逐步把車輛、人機和車機升級為數字化的過程。眾所周知在當下汽車市場負增長態勢顯現,各大車企都在紛紛進行市場銷售模式轉型的過程中,數字化在行業轉型的背景下發揮了決定性作用。視車科技在這過程中為眾多主機廠品牌提供了專業的數字化轉型成功的方案。通過線上體驗的線下門店的數字新零售的整合營銷升級,數字可視化技術讓大量車型的三維數據與配置器生產線打通,從而實現了柔性定制化車輛生產。將客戶逐步變為用戶,以蔚來汽車、小鵬汽車為代表的自主創新品牌也通過C2M的方式為車主提供了多樣且符合用戶需求的選擇,都些都離不開數字化技術的幫助。

??
在人機變化上,物理機械儀表盤通過數字化的方式被替換成了屏幕顯示的虛擬儀表。在中控臺上的物理按鍵也被一塊塊的觸摸屏所取代。五年前的汽車設計師還在猶豫在一個沒有物理按鍵的IP和Console的內飾中,怎么能保證交互中的駕駛安全。同樣AR可視化風擋輔助駕駛技術也會很快地在未來車內人機交互中落地應用。在車機數字化方面,車輛的行駛環境的數字化,比如通過虛擬現實方式為自動駕駛車輛搭建全數字化的仿真訓練場地。當一臺無人車在真實道路環境里面訓練一個固定范圍的路線,它的訓練效率是有上限的,受到時間、行駛速度、氣候因素等多維度的限制。但當把這段道路數據采集后通過數字化方式生成虛擬現實道路場景后,我們在虛擬環境中可以設置無窮多變化的氣候條件,多種行駛速度狀態,障礙物隨機等等。甚至人為控制車輛行人障礙物干擾。這樣的數字化訓練環境,只要電腦性能足夠強大,虛擬無人車可以在一小時內就能夠跑完上百年才能跑完的道路里程的數據積累。這時候無人車行駛在真實道路上的能力和安全系數就會大很多。現有的車輛都是一個個單獨數字化個體,很難在行駛過程中保證與其他車輛的安全避讓。在未來數字化的虛擬世界中,為每個真實物體生成一個數字孿生個體,實現路面上的每臺車,城市里面的每個物體的數據交換,達成V2X的萬物互聯。
當進入數字化3.0階段時,所有的物體已被數字化相連,無人車已完全變成了一個移動空間。到那時我們要考慮的是在從A點到B點的移動空間中究竟該做些什么?在里面遨游一下海底世界,通過全息顯示屏跟朋友打一場斗地主,在數字化3.0物聯全息化階段還有很多事情需要我們去暢想探索的。
??
當我們回看歷史,PPT中的照片是上世紀60年代美國通用開發的自動駕駛概念車“Firebird”,BBC在當時為其行駛做了電視轉播。影像資料把我們帶回到了六七十年前,那時的汽車研發人員已經把自動駕駛車輛的內部空間設計成了四個人面圍坐在圓桌前。60年后我們再次暢想自動駕駛未來會為我們的生活和移動帶來哪些的變化?在未來的無人車中我們可以工作、購物、社交,也可以在無人車里與同伴比一場全沉浸式的賽車游戲……未來等待你我一同去探索與實現。
責任編輯:Rex_07